Fine-tuning robot policies while maintaining user privacy
Benjamin A. Christie, Sagar Parekh, Dylan P. Losey
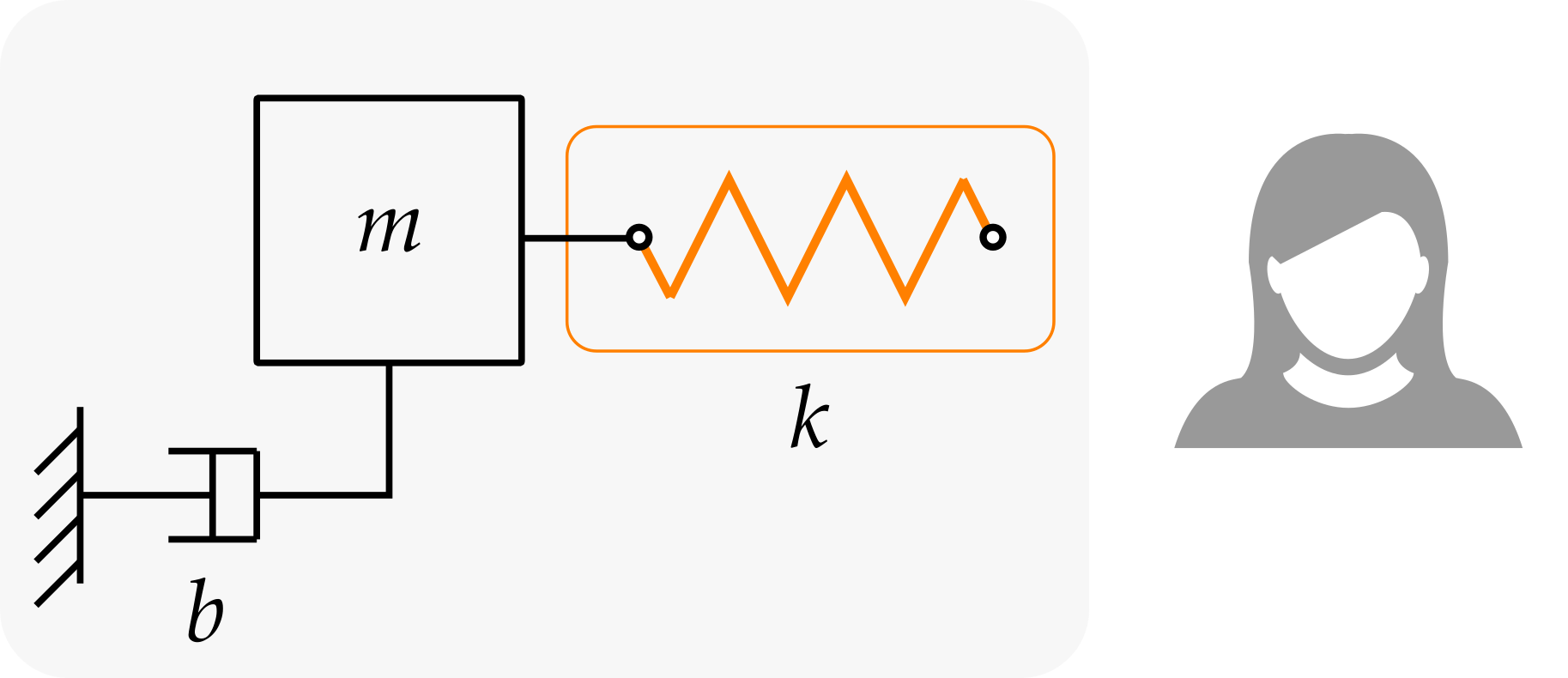
Combining performance and passivity in linear control of series elastic actuators
Shaunak A. Mehta, Dylan P. Losey
Teleoperator-aware and safety-critical adaptive nonlinear MPC for shared autonomy in obstacle avoidance of legged robots
Ruturaj Sambhus, Muneeb Ahmad, Basit Muhammad Imran, Sujith Vijayan, Dylan P. Losey, Kaveh Akbari Hamed
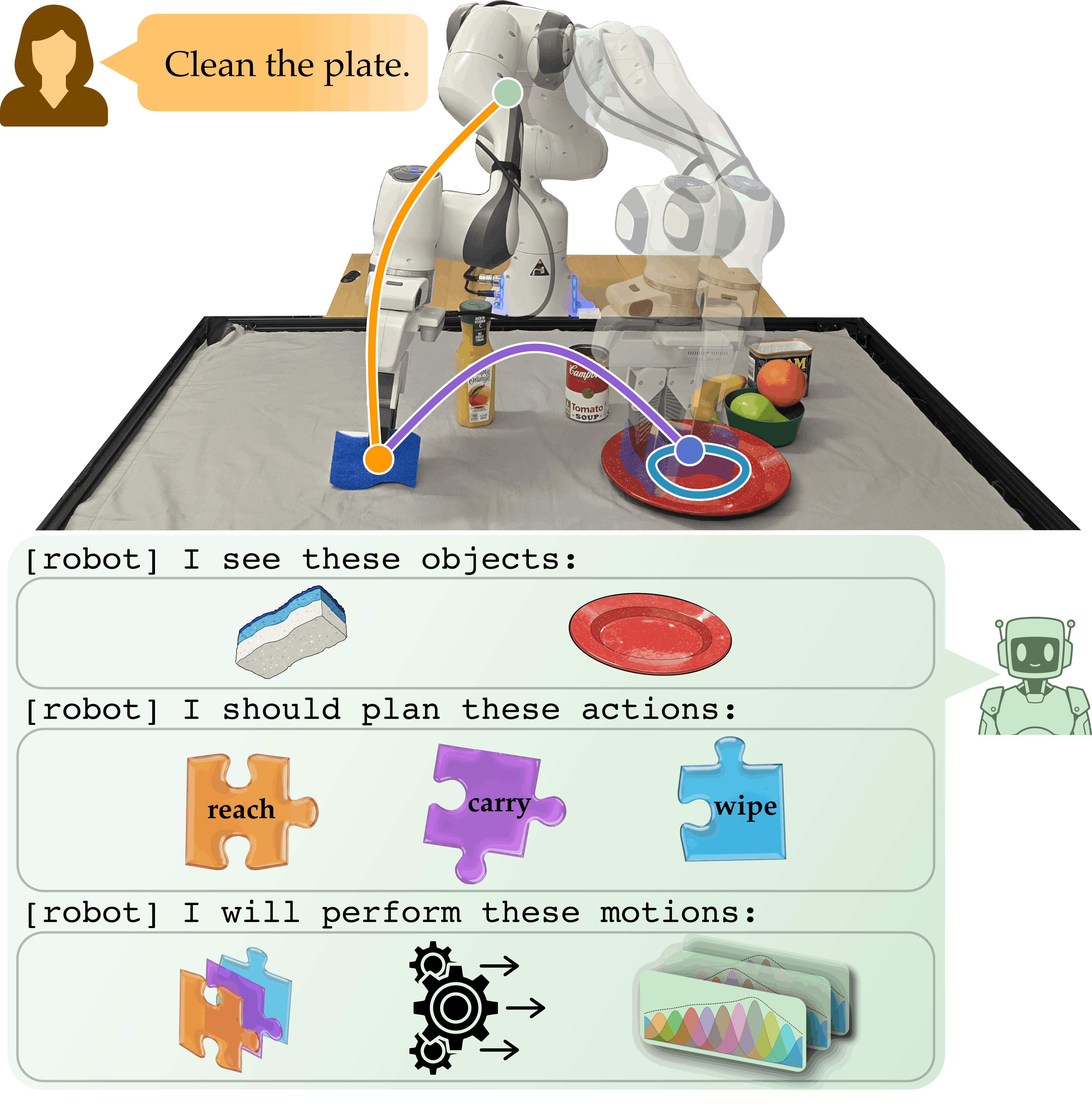
Language movement primitives: Grounding language models in robot motion
Yinlong Dai, Benjamin A. Christie, Daniel J. Evans, Dylan P. Losey, and Simon Stepputtis
Shared control/autonomy: A historical perspective, current trends, and the role of generative AI
Michael Hagenow, Mario Selvaggio, Xuehui Yu, Yanwei Wang, Yiannis Demiris, Andreea Bobu, Yilun Du, Harold Soh, Dylan P. Losey, Julie Shah
2025
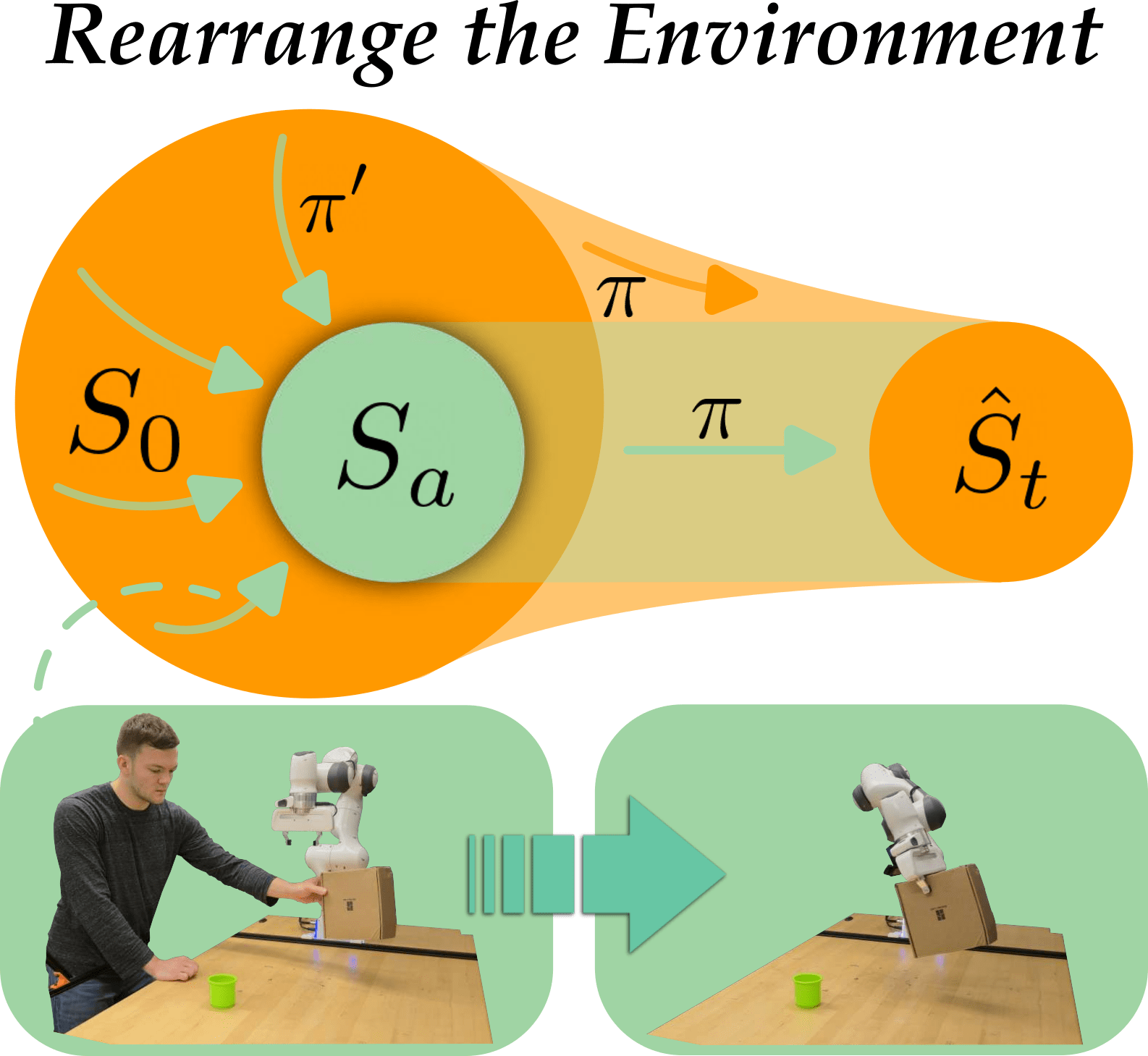
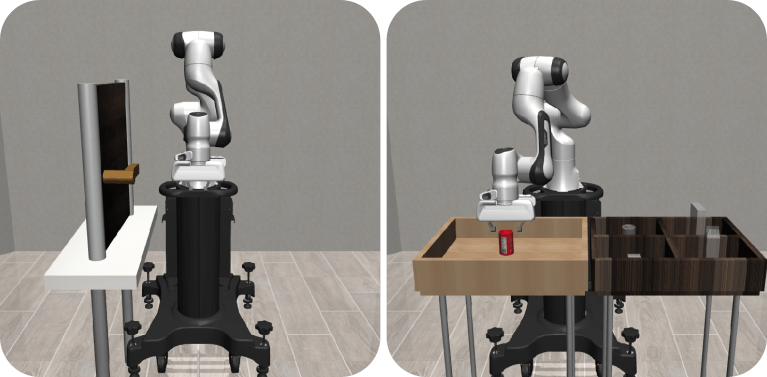
Prepare before you act: Learning from humans to rearrange initial states
Yinlong Dai, Andre Keyser, Dylan P. Losey IEEE International Conference on Robotics and Automation
Towards robots that learn from humans
Dylan P. Losey
Towards balanced behavior cloning from imbalanced datasets
Sagar Parekh, Heramb Nemlekar, Dylan P. Losey Autonomous Robots
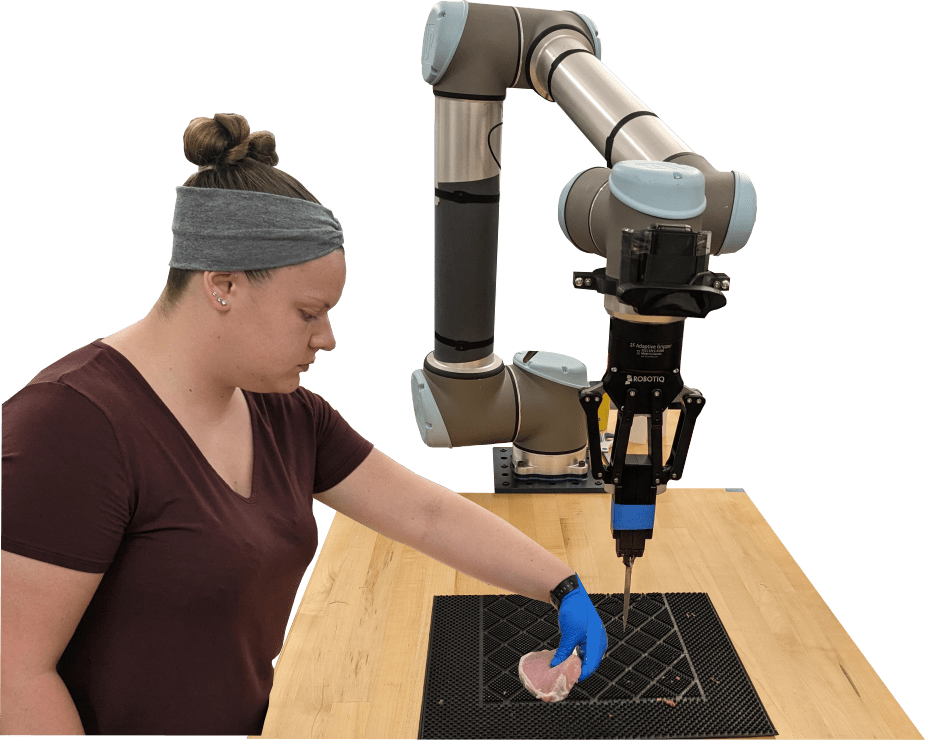
Safe and transparent robots for human-in-the-loop meat processing
Sagar Parekh, Casey Grothoff, Ryan Wright, Robin White, Dylan P. Losey
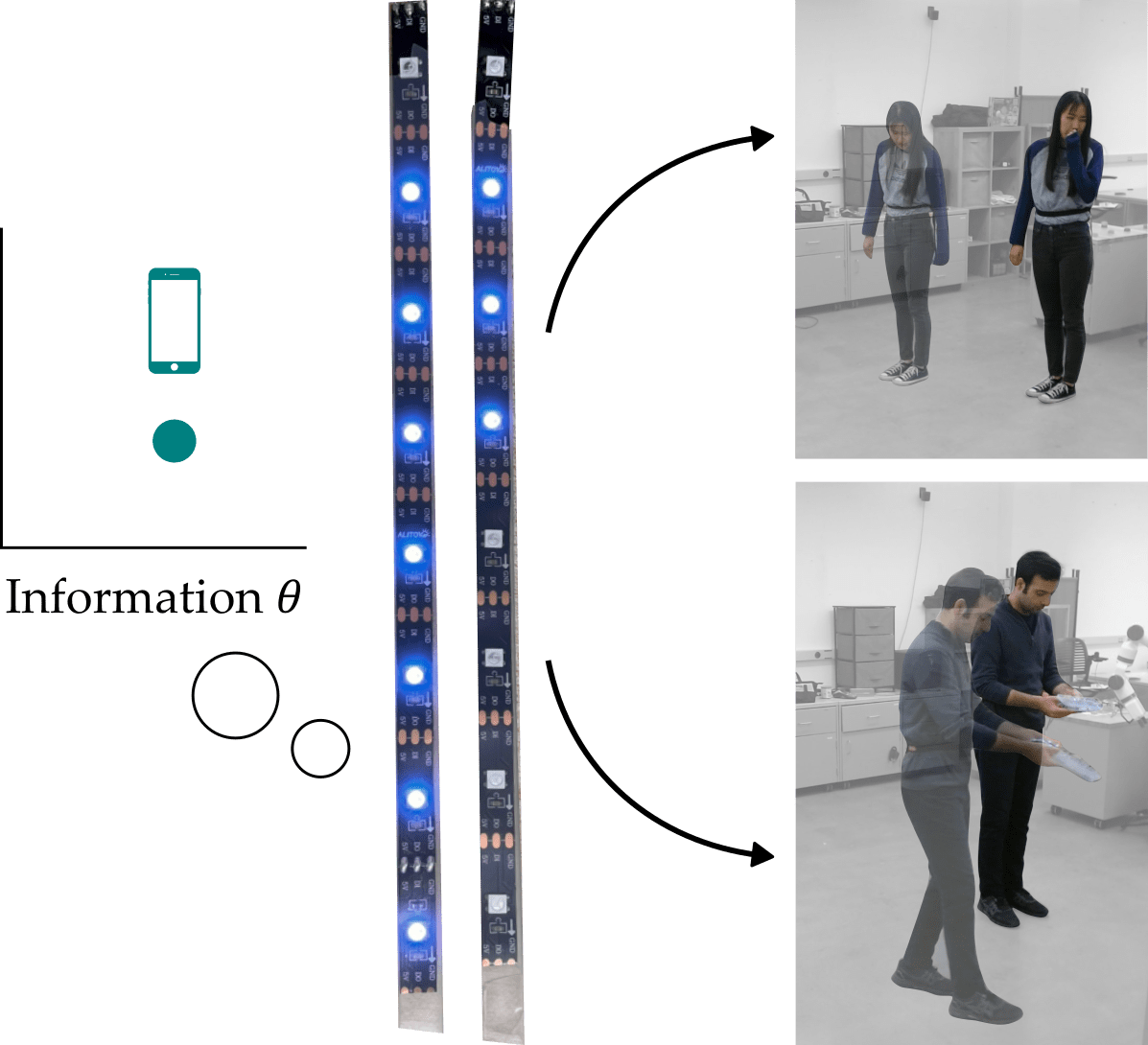
A modular haptic display with reconfigurable signals for personalized information transfer
Antonio Alvarez Valdivia, Benjamin A. Christie, Dylan P. Losey, Laura H. Blumenschein IEEE Transactions on Haptics
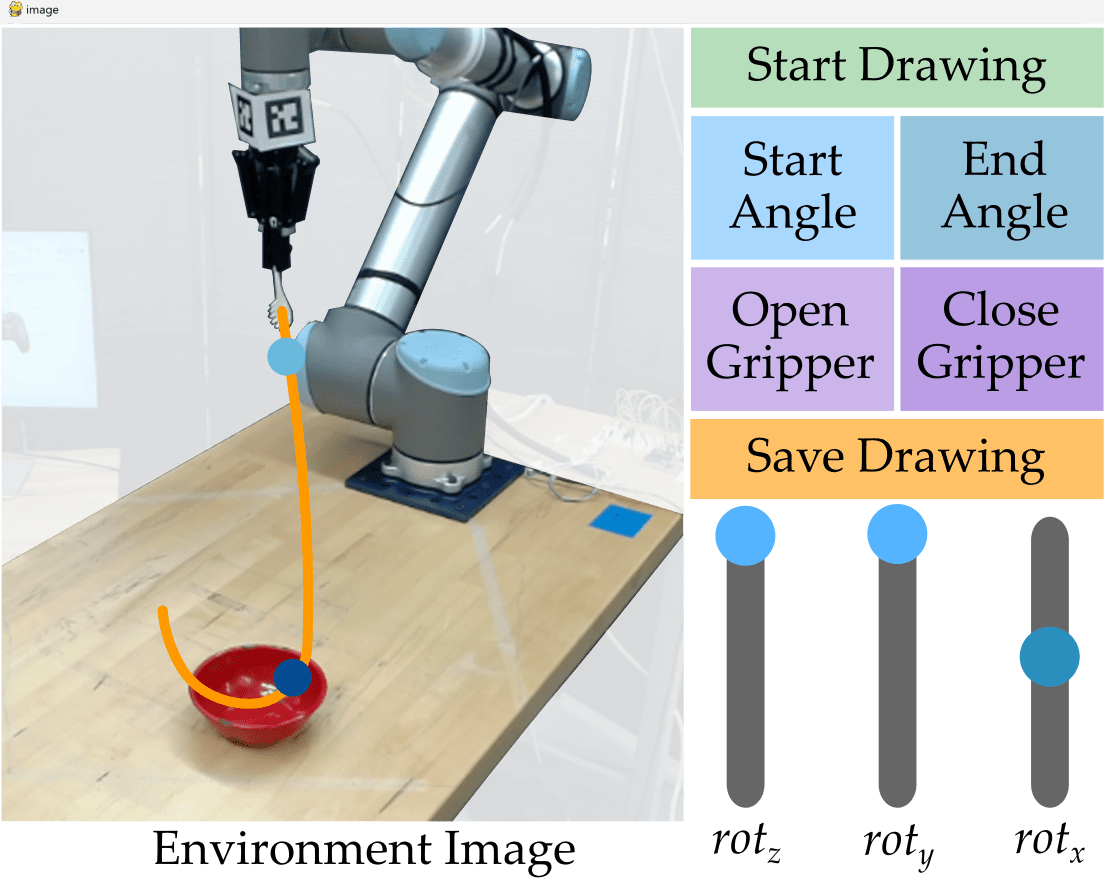
L2D2: Robot learning from 2D drawings
Shaunak A. Mehta, Heramb Nemlekar, Hari Sumant, Dylan P. Losey Autonomous Robots
Counterfactual behavior cloning: Offline imitation learning from imperfect human demonstrations
Shahabedin Sagheb, Dylan P. Losey
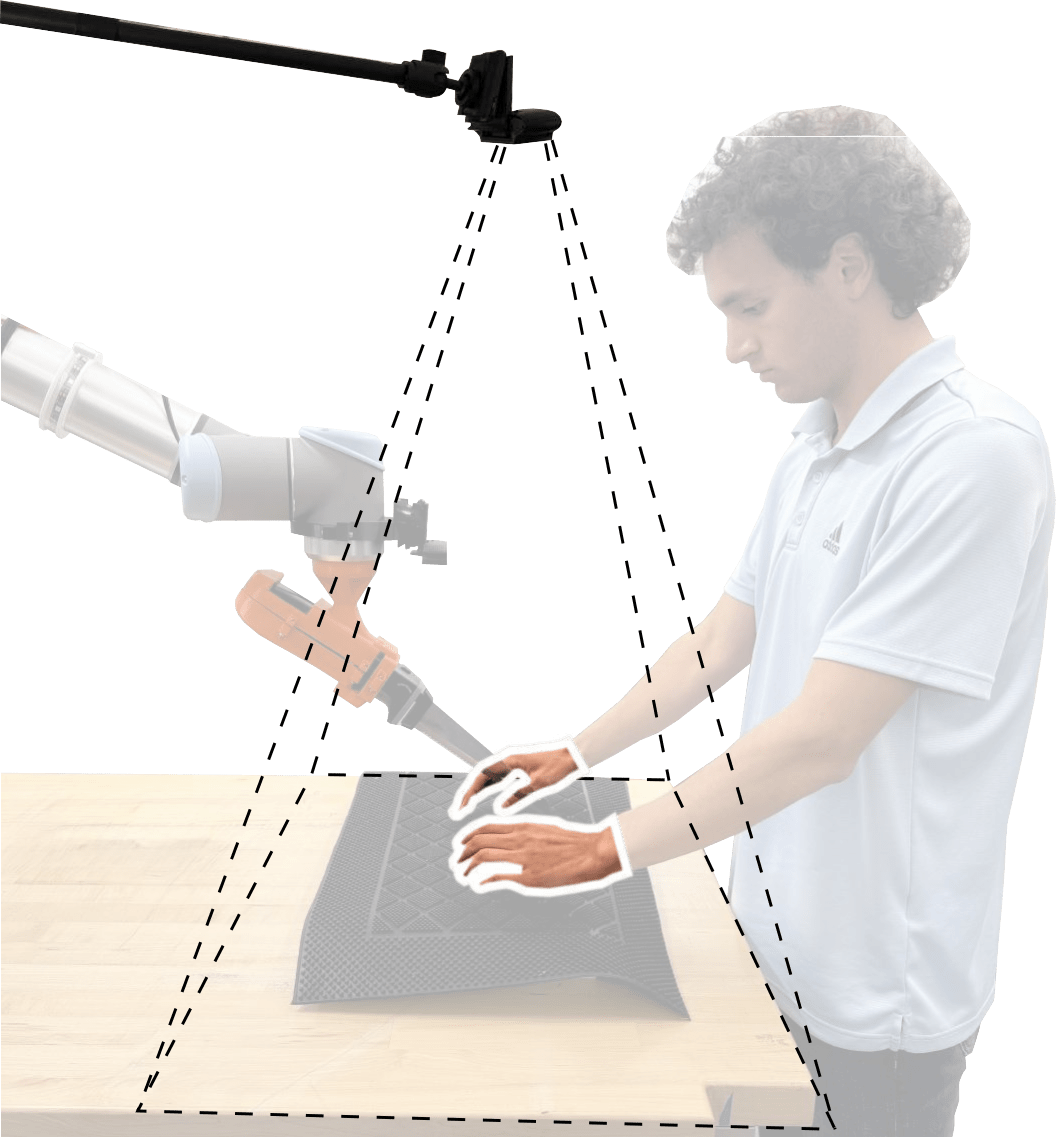
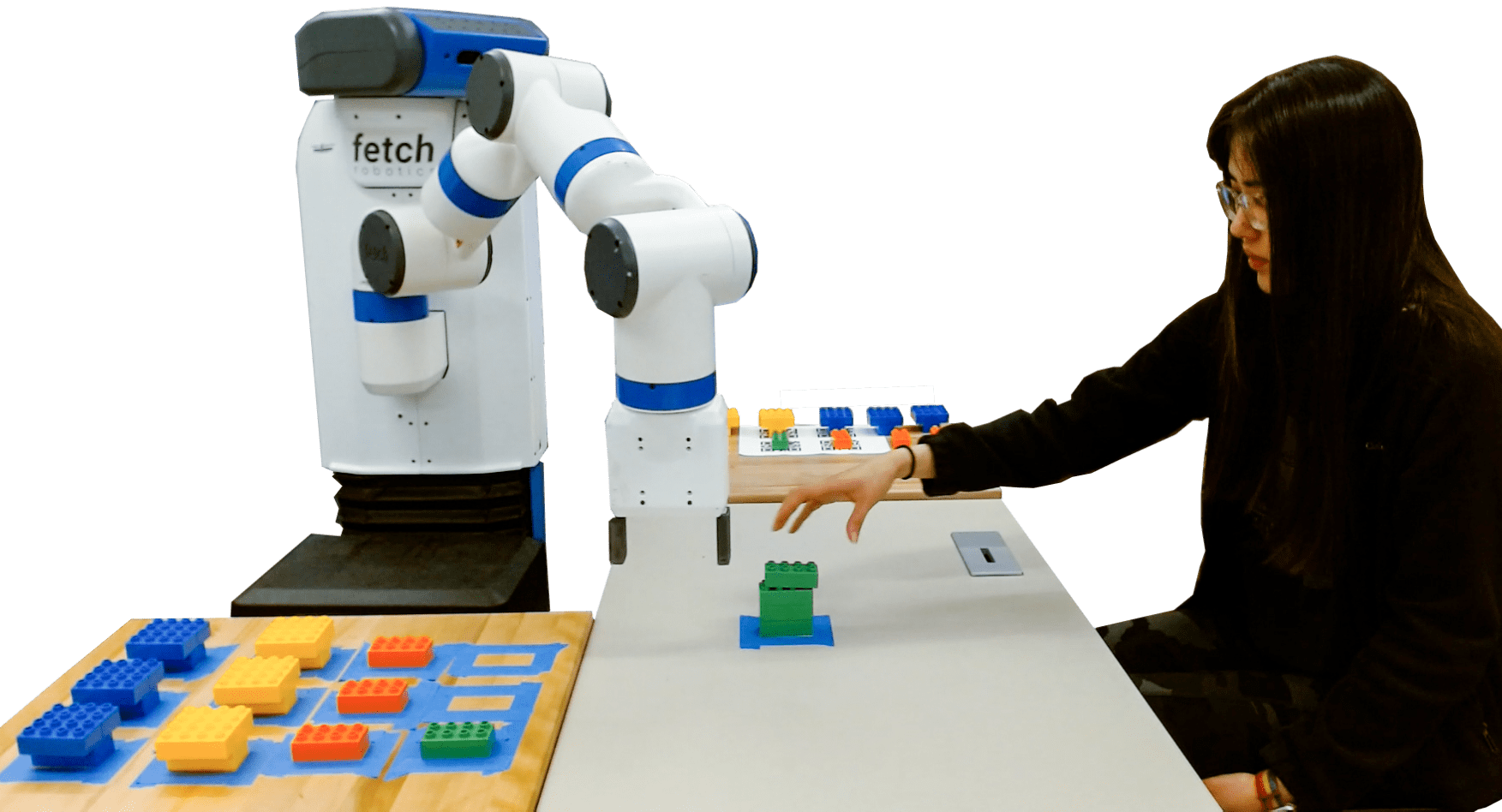
CIVIL: Causal and intuitive visual imitation learning
Yinlong Dai, Robert Ramirez Sanchez, Ryan Jeronimus, Shahabedin Sagheb, Cara M. Nunez, Heramb Nemlekar, Dylan P. Losey
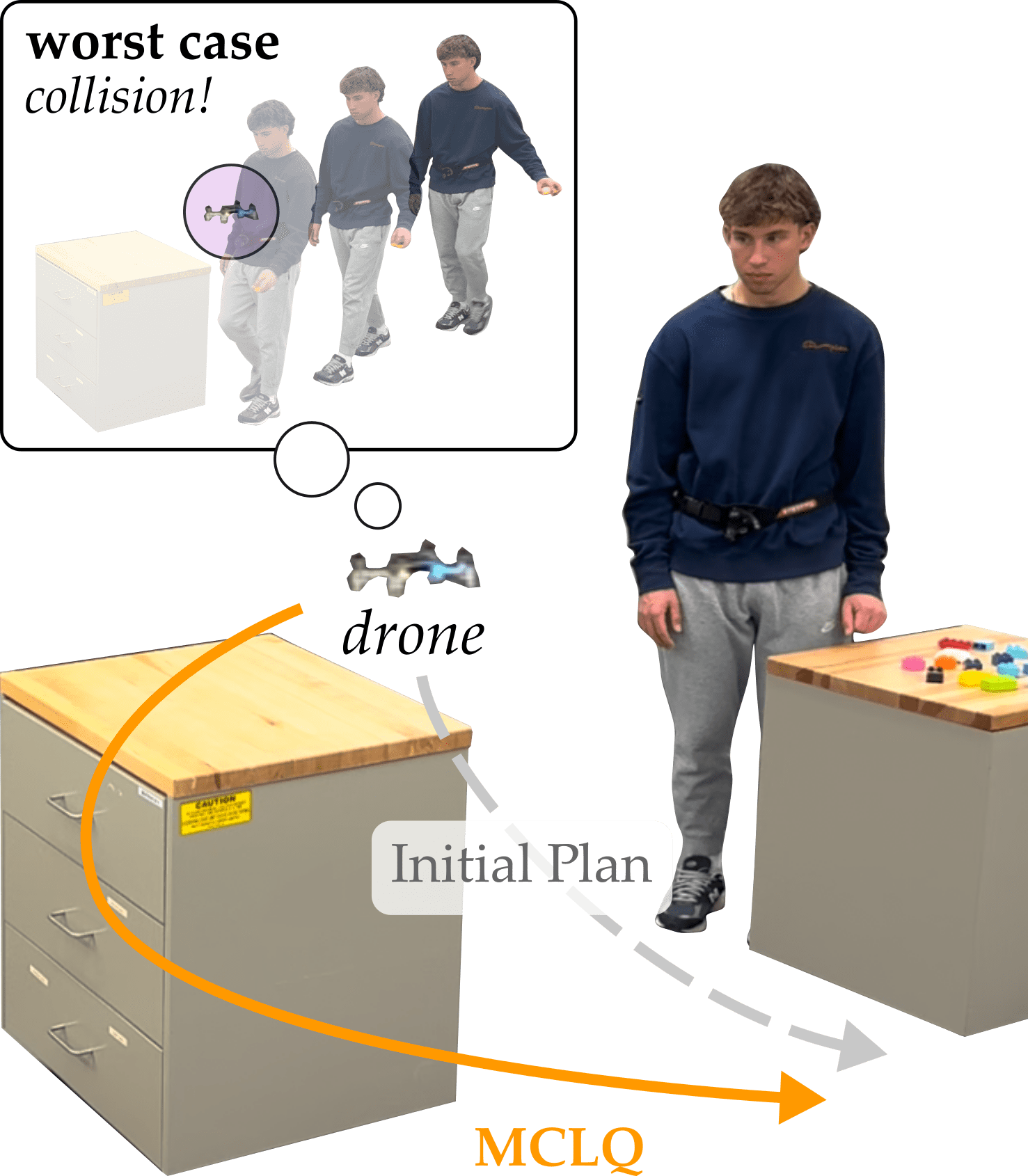
Safe interaction via Monte Carlo linear-quadratic games
Benjamin A. Christie, Dylan P. Losey
A unified framework for robots that influence humans over long-term interaction
Shahabedin Sagheb, Sagar Parekh, Ravi Pandya, Ye-Ji Mun, Katherine Driggs-Campbell, Andrea Bajcsy, Dylan P. Losey
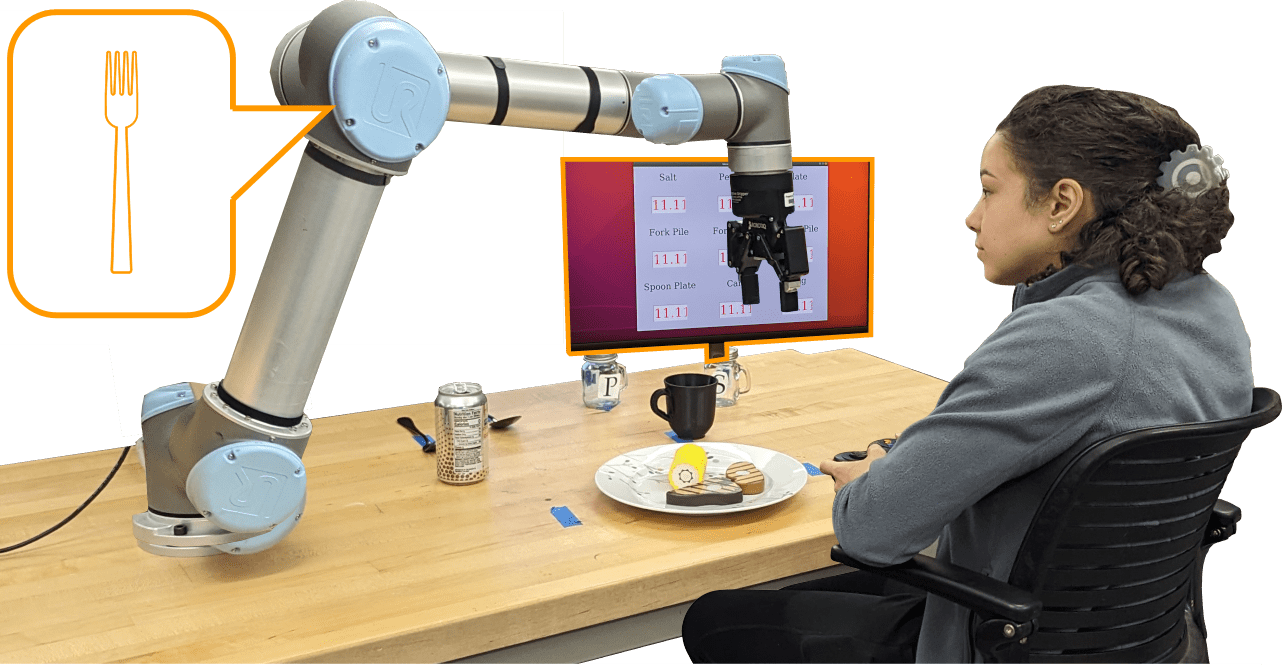
Kiri-Spoon: A kirigami utensil for robot-assisted feeding
Maya Keely, Brandon Franco, Casey Grothoff, Rajat Kumar Jenamani, Tapomayukh Bhattacharjee, Dylan P. Losey, Heramb Nemlekar The International Journal of Robotics Research
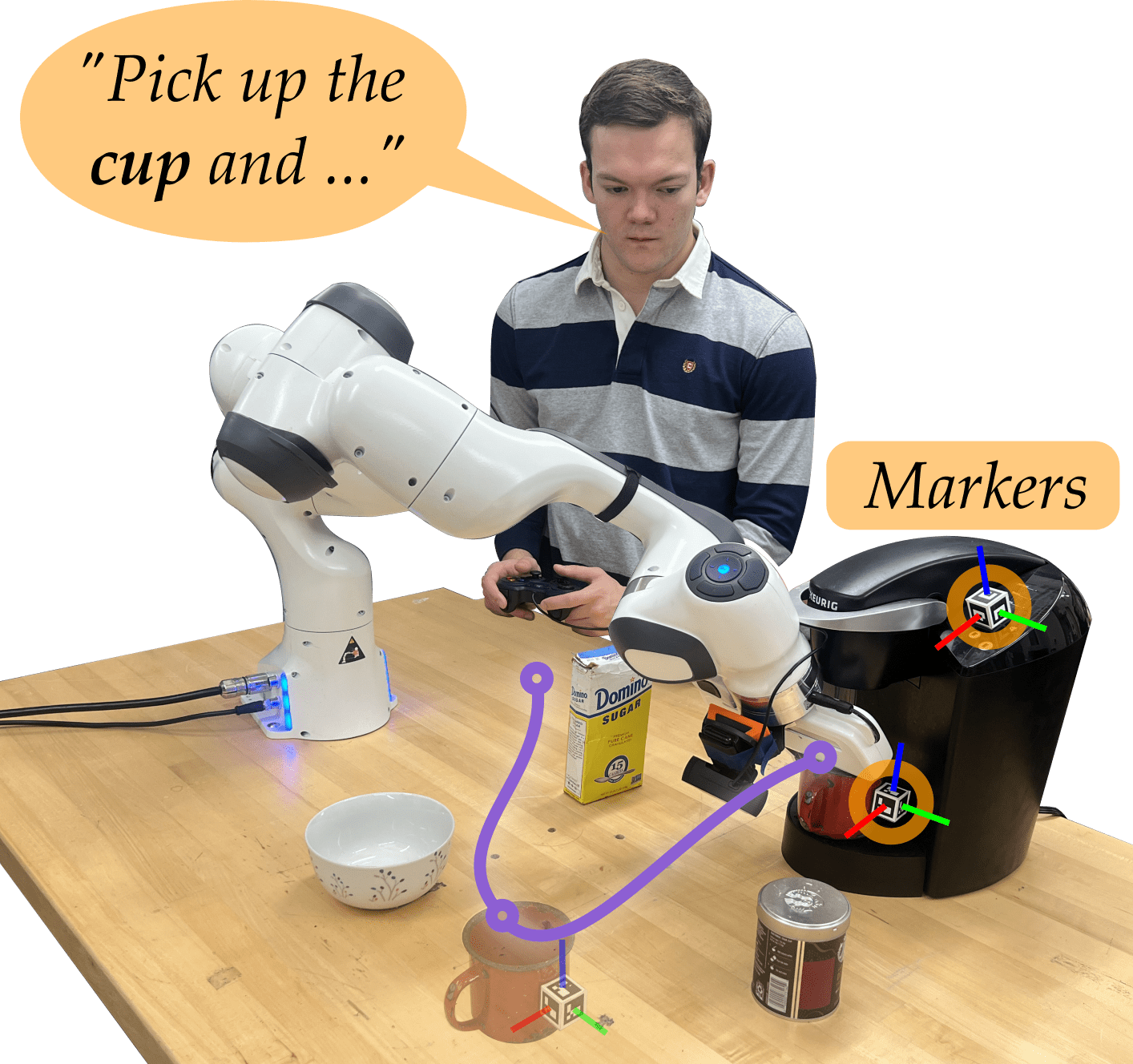
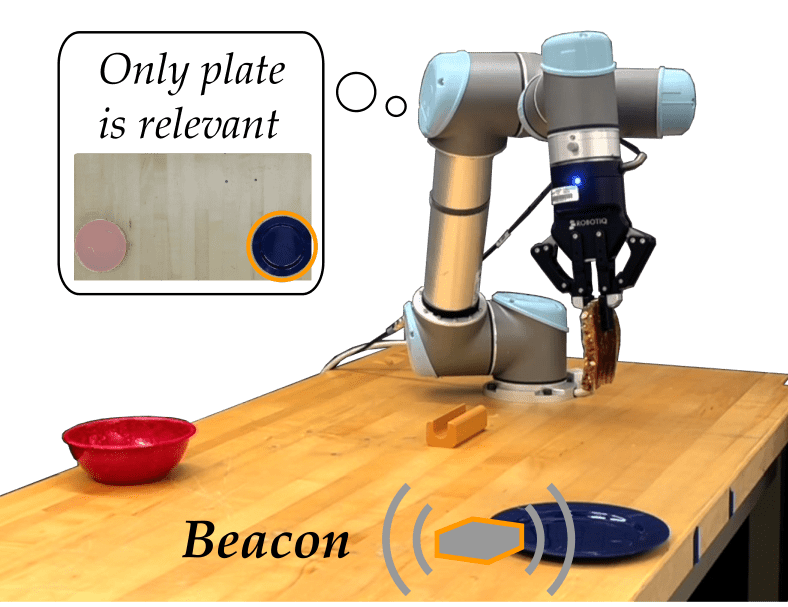
RECON: Reducing causal confusion with human-placed markers
Robert Ramirez Sanchez, Heramb Nemlekar, Shahabedin Sagheb, Cara M. Nunez, Dylan P. Losey IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
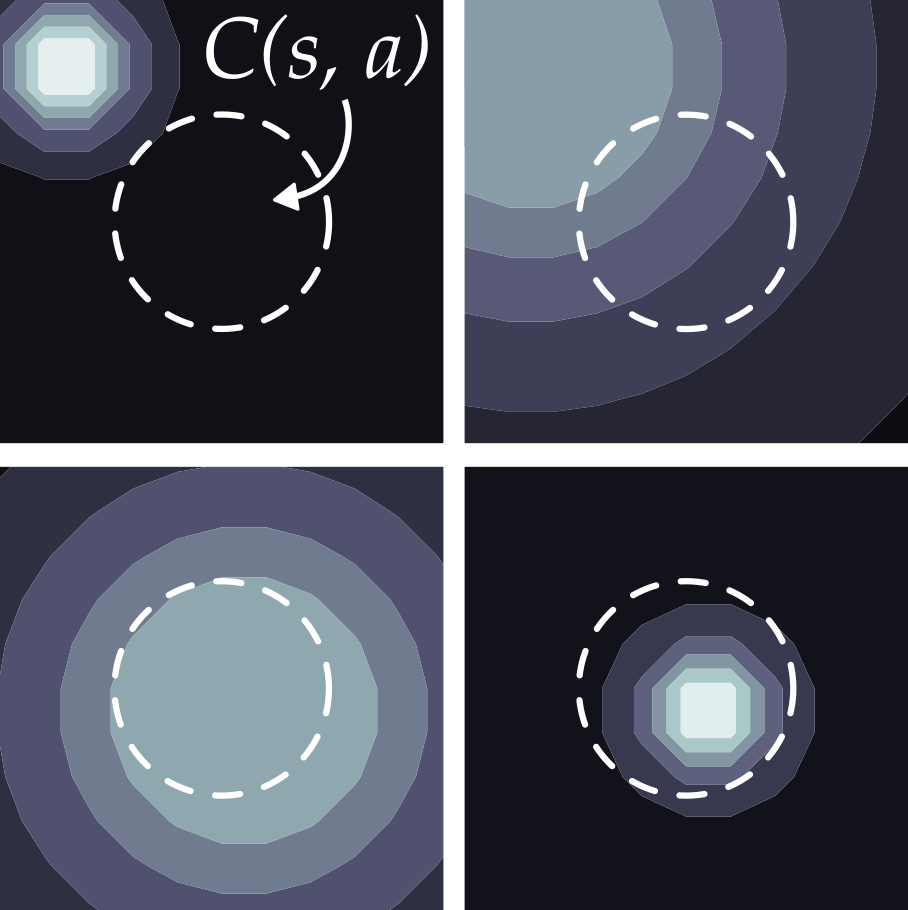
Using high-level patterns to estimate how humans predict a robot will behave
Sagar Parekh, Lauren Bramblett, Nicola Bezzo, Dylan P. Losey IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Personalizing interfaces to humans with user-friendly priors
Benjamin A. Christie, Heramb Nemlekar, Dylan P. Losey IEEE International Conference on Robotics and Automation (ICRA)
2024
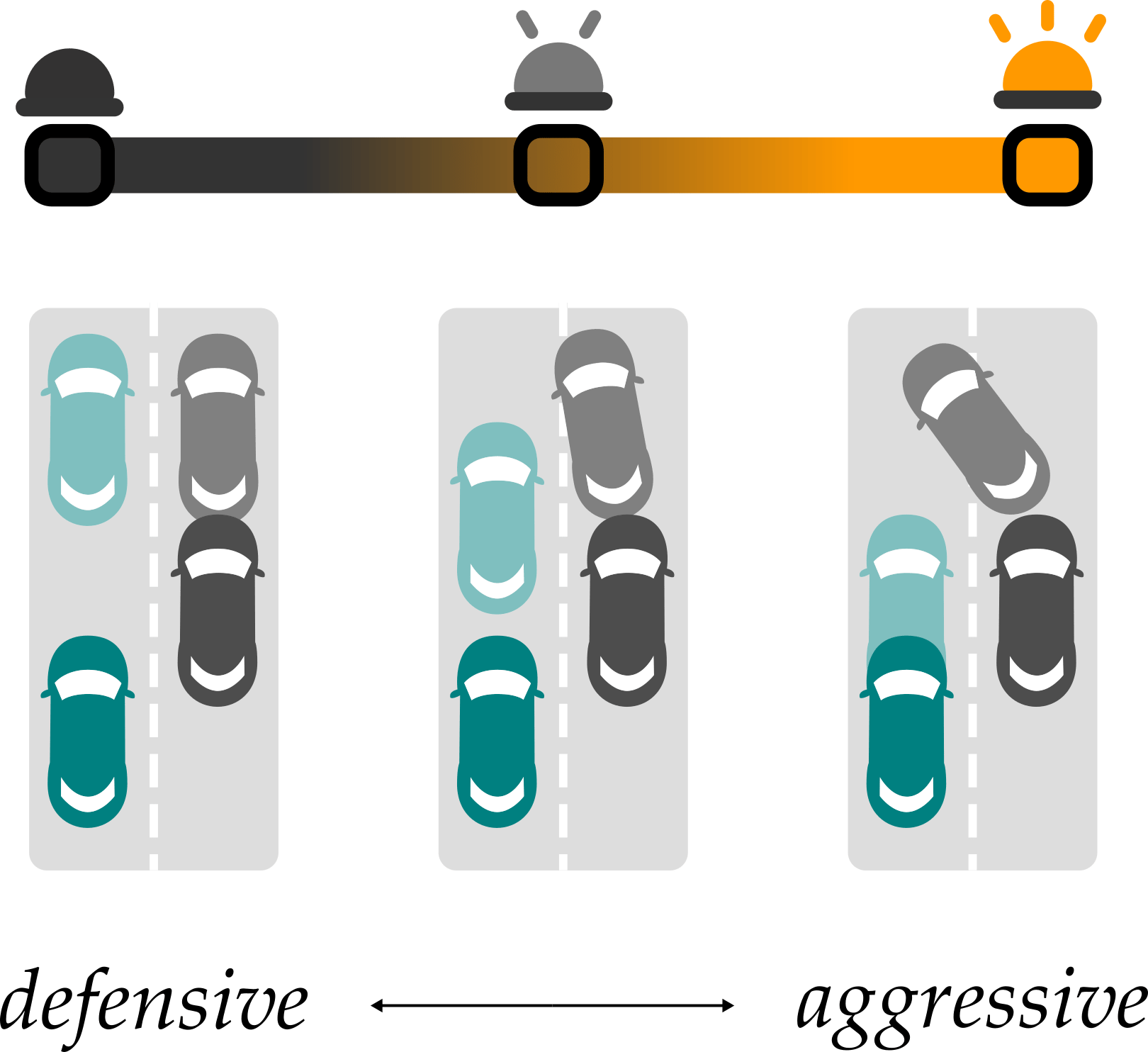
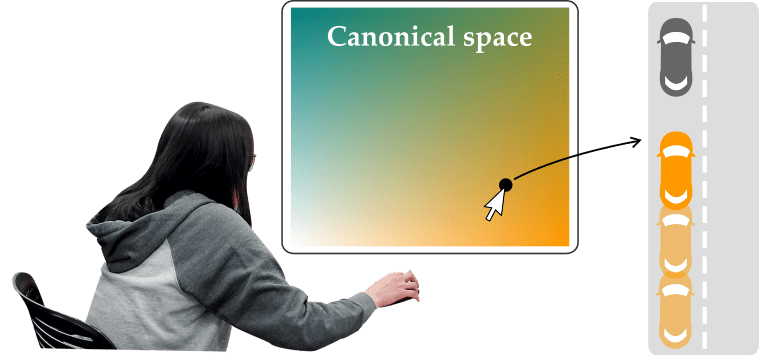
PECAN: Personalizing robot behaviors through a learned canonical space
Heramb Nemlekar, Robert Ramirez Sanchez, Dylan P. Losey ACM Transactions on Human-Robot Interaction
Should collaborative robots be transparent?
Shahabedin Sagheb, Soham Gandhi, Dylan P. Losey International Journal of Social Robotics
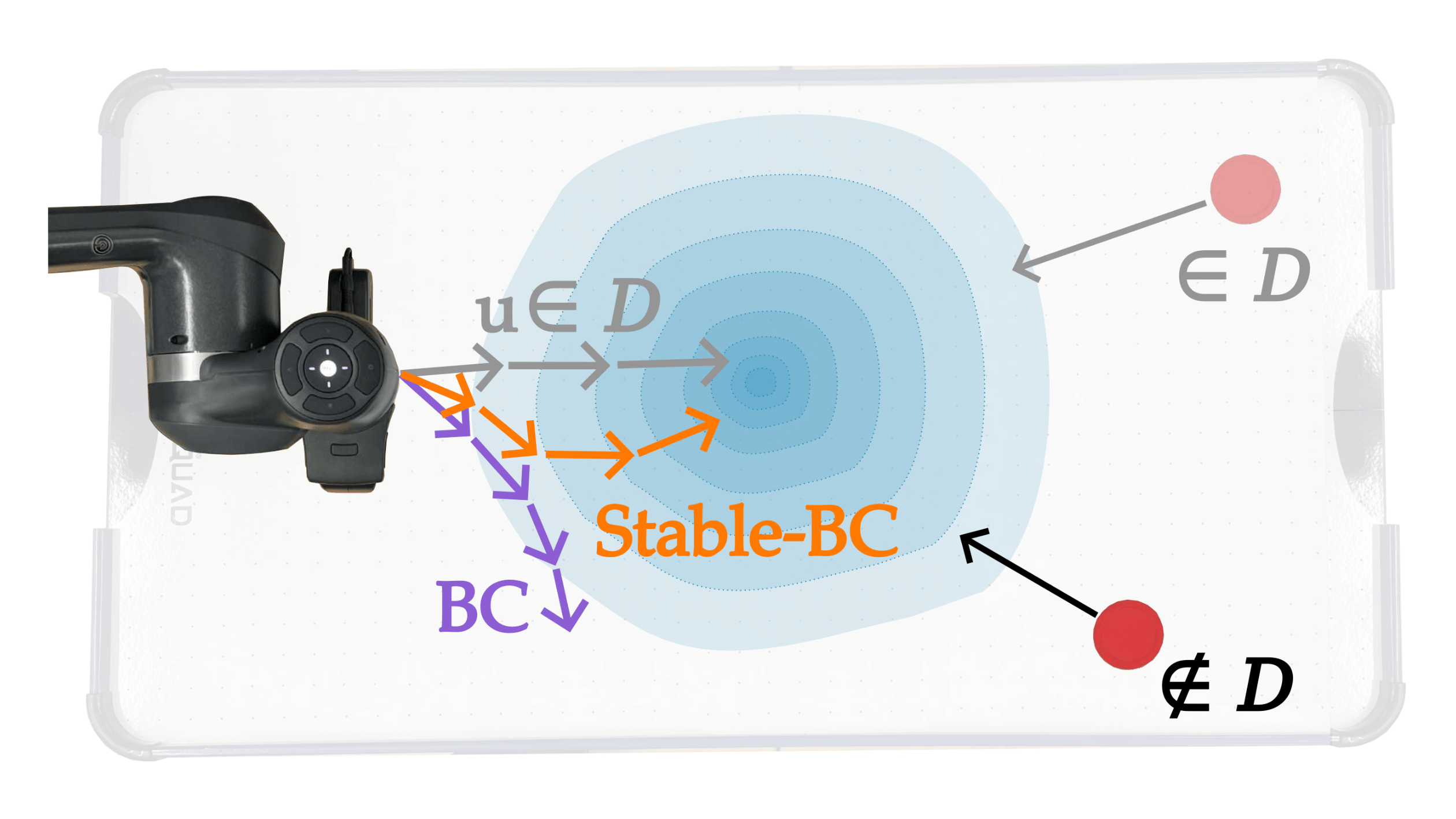
Stable-BC: Controlling covariate shift with stable behavior cloning
Shaunak A. Mehta, Yusuf Umut Ciftci, Balamurugan Ramachandran, Somil Bansal, Dylan P. Losey IEEE Robotics and Automation Letters
VIEW: Visual imitation learning with waypoints
Ananth Jonnavittula, Sagar Parekh, Dylan P. Losey Autonomous Robots
Combining and decoupling rigid and soft grippers to enhance robotic manipulation
Maya Keely, Yeunhee Kim, Shaunak A. Mehta, Joshua Hoegerman, Robert Ramirez Sanchez, Emily Paul, Camryn Mills, Dylan P. Losey, Michael D. Bartlett Soft Robotics
Kiri-Spoon: A soft shape-changing utensil for robot-assisted feeding
Maya N. Keely, Heramb Nemlekar, Dylan P. Losey IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Waypoint-based reinforcement learning for robot manipulation tasks
Shaunak A. Mehta, Soheil Habibian, Dylan P. Losey IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Aligning learning with communication in shared autonomy
Joshua Hoegerman, Shahabedin Sagheb, Benjamin A. Christie, Dylan P. Losey IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
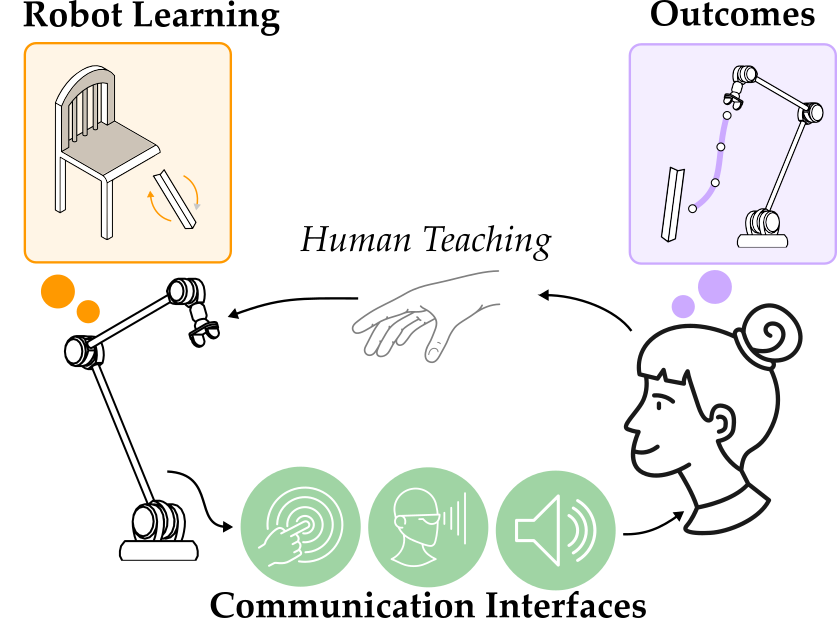
A survey of communicating robot learning during human-robot interaction
Soheil Habibian, Antonio Alvarez Valdivia, Laura H. Blumenschein, Dylan P. Losey The International Journal of Robotics Research
LIMIT: Learning interfaces to maximize information transfer
Benjamin A. Christie, Dylan P. Losey ACM Transactions on Human-Robot Interaction
SARI: Shared autonomy across repeated interaction
Ananth Jonnavittula, Shaunak A. Mehta, Dylan P. Losey ACM Transactions on Human-Robot Interaction
2023
Safely and autonomously cutting meat with a collaborative robot arm
Ryan Wright, Sagar Parekh, Robin White, Dylan P. Losey Scientific Reports
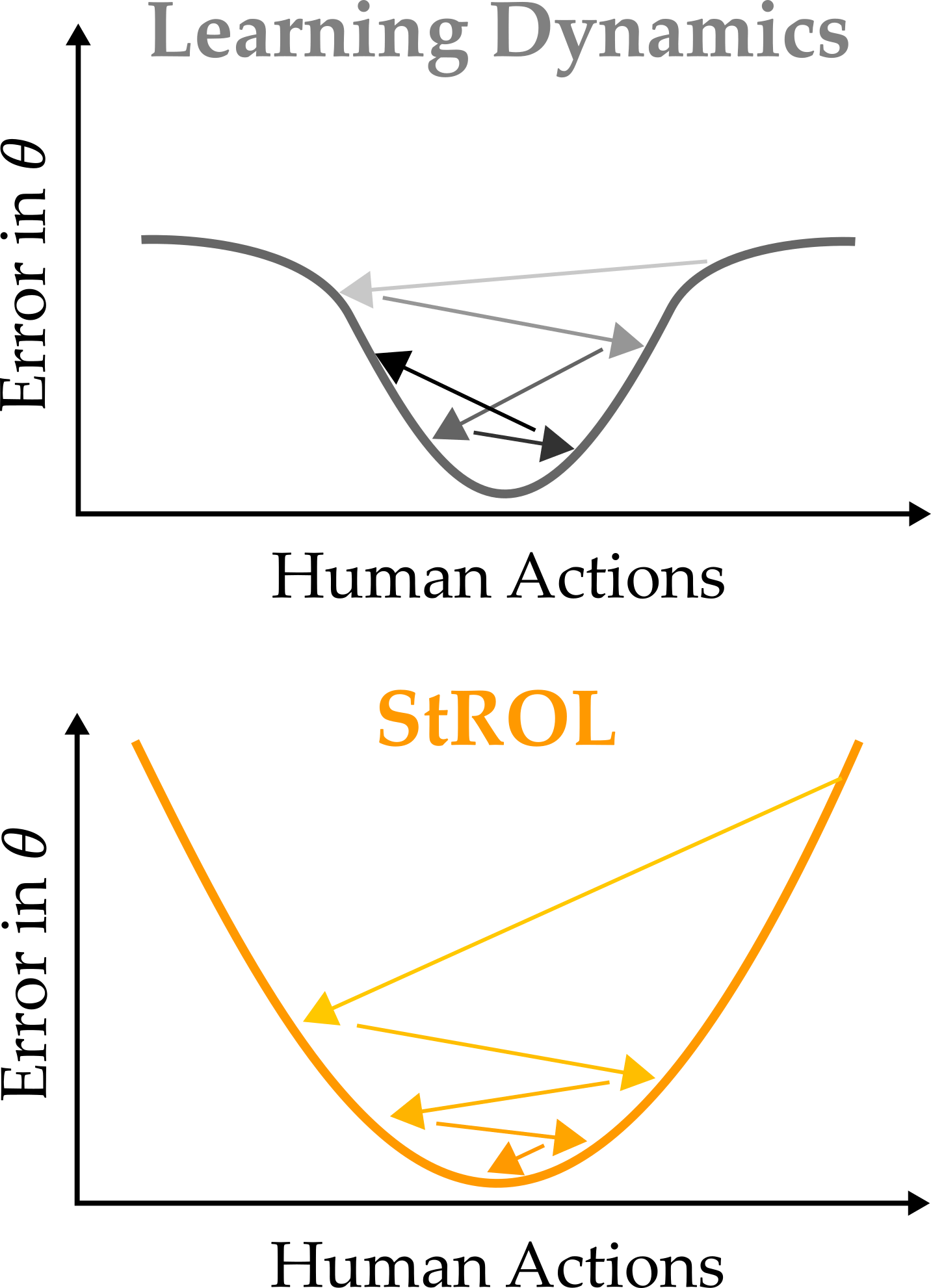
StROL: Stabilized and robust online learning from humans
Shaunak A. Mehta, Forrest Meng, Andrea Bajcsy, Dylan P. Losey IEEE Robotics and Automation Letters
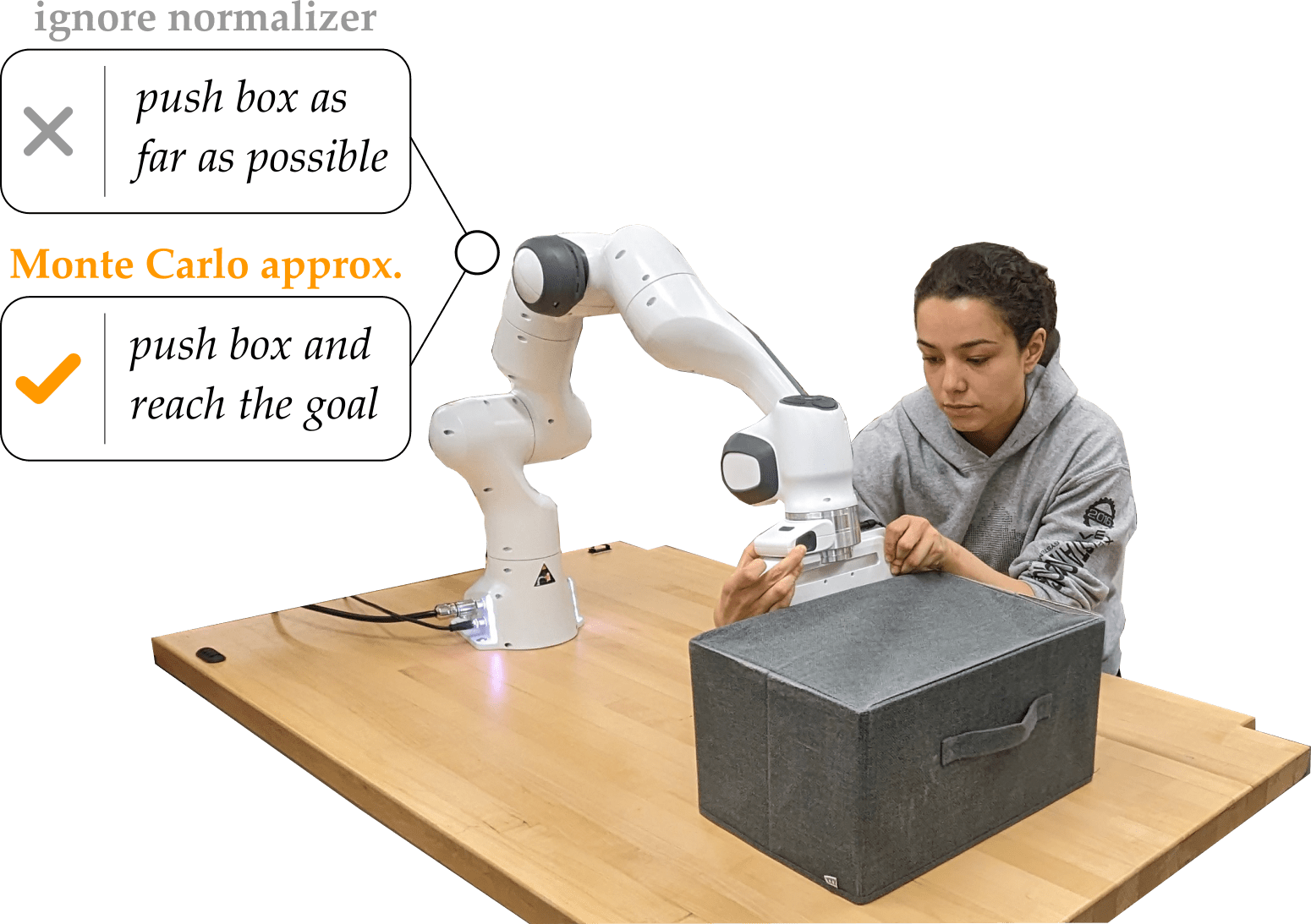
Reward learning with intractable normalizing functions
Joshua Hoegerman, Dylan P. Losey IEEE Robotics and Automation Letters
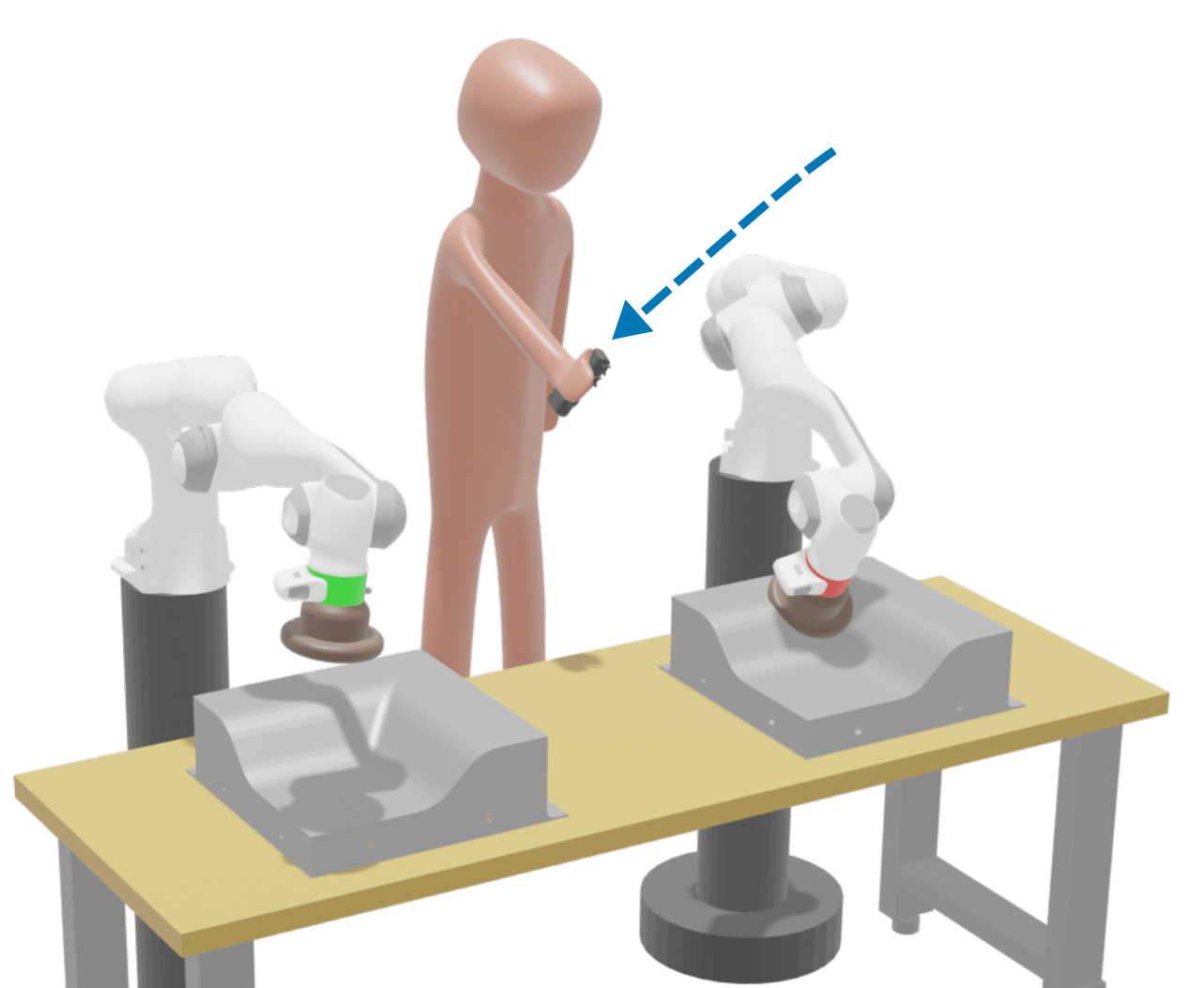
Coordinated multi-robot shared autonomy based on scheduling and demonstrations
Michael Hagenow, Emmanuel Senft, Nitzan Orr, Robert Radwin, Michael Gleicher, Bilge Mutlu, Dylan P. Losey, Michael Zinn IEEE Robotics and Automation Letters
Unified learning from demonstrations, corrections, and preferences during physical human-robot interaction
Shaunak A. Mehta, Dylan P. Losey ACM Transactions on Human-Robot Interaction
Learning latent representations to co-adapt to humans
Sagar Parekh, Dylan P. Losey Autonomous Robots
RISO: Combining rigid grippers with soft switchable adhesives
Shaunak A. Mehta, Yeunhee Kim, Joshua Hoegerman, Michael D. Bartlett, Dylan P. Losey IEEE International Conference on Soft Robotics (RoboSoft)
Towards robots that influence humans over long-term interaction
Shahabedin Sagheb, Ye-Ji Mun, Neema Ahmadian, Benjamin A. Christie, Andrea Bajcsy, Katherine Driggs-Campbell, Dylan P. Losey IEEE International Conference on Robotics and Automation (ICRA)
Wrapping haptic displays around robot arms to communicate learning
Antonio Alvarez Valdivia, Soheil Habibian, Carly A. Mendenhall, Francesco Fuentes, Ritish Shailly, Dylan P. Losey, Laura H. Blumenschein IEEE Transactions on Haptics
2022
Encouraging human interaction with robot teams: Legible and fair subtask allocations
Soheil Habibian, Dylan P. Losey IEEE Robotics and Automation Letters
RILI: Robustly influencing latent intent
Sagar Parekh, Soheil Habibian, Dylan P. Losey IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Wrapped haptic display for communicating physical robot learning
Antonio Alvarez Valdivia, Ritish Shailly, Naman Seth, Francesco Fuentes, Dylan P. Losey, Laura H. Blumenschein IEEE International Conference on Soft Robotics (RoboSoft)
Learning latent actions without human demonstrations
Shaunak A. Mehta, Sagar Parekh, Dylan P. Losey IEEE International Conference on Robotics and Automation (ICRA)
Communicating robot conventions through shared autonomy
Ananth Jonnavittula, Dylan P. Losey IEEE International Conference on Robotics and Automation (ICRA)
Assisting operators of articulated machinery with optimal planning and goal inference
Ehsan Yousefi, Dylan P. Losey, Inna Sharf IEEE International Conference on Robotics and Automation (ICRA)
Here’s what I’ve learned: Asking questions that reveal reward learning
Soheil Habibian, Ananth Jonnavittula, Dylan P. Losey ACM Transactions on Human-Robot Interaction
2021
Communicating inferred goals with passive augmented reality and active haptic feedback
James F. Mullen Jr, Josh Mosier, Sounak Chakrabarti, Anqi Chen, Tyler White, Dylan P. Losey IEEE Robotics and Automation Letters
Learning to share autonomy across repeated interaction
Ananth Jonnavittula, Dylan P. Losey IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
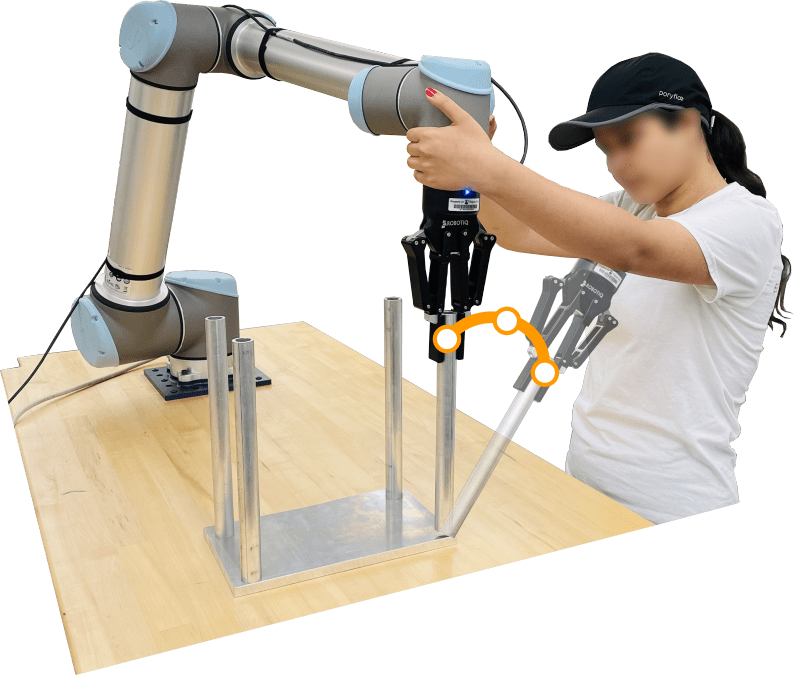
Physical interaction as communication: Learning robot objectives online from human corrections
Dylan P. Losey, Andrea Bajcsy, Marcia K. O'Malley, Anca D. Dragan The International Journal of Robotics Research
Learning reward functions from diverse sources of human feedback: Optimally integrating demonstrations and preferences
Erdem Biyik, Dylan P. Losey, Malayandi Palan, Nicholas C. Landolfi, Gleb Shevchuk, Dorsa Sadigh The International Journal of Robotics Research
Learning latent actions to control assistive robots
Dylan P. Losey, Hong Jun Jeon, Mengxi Li, Krishnan Srinivasan, Ajay Mandlekar, Animesh Garg, Jeannette Bohg, Dorsa Sadigh Autonomous Robots
Learning visually guided latent actions for assistive teleoperation
Siddharth Karamcheti, Albert J. Zhai, Dylan P. Losey, Dorsa Sadigh Learning for Dynamics & Control (L4DC)
I know what you meant: Learning human objectives by (under)estimating their choice set
Ananth Jonnavittula, Dylan P. Losey IEEE International Conference on Robotics and Automation (ICRA)
Learning human objectives from sequences of physical corrections
Mengxi Li, Alper Canberk, Dylan P. Losey, Dorsa Sadigh IEEE International Conference on Robotics and Automation (ICRA)
2020
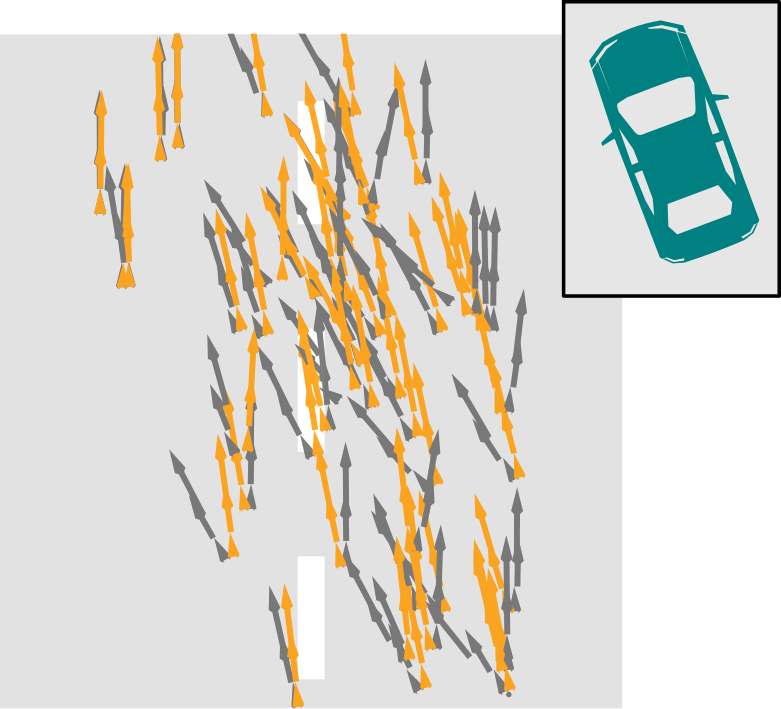
Learning latent representations to influence multi-agent interaction
Annie Xie, Dylan P. Losey, Ryan Tolsma, Chelsea Finn, Dorsa Sadigh Conference on Robot Learning (CoRL)
Learning user-preferred mappings for intuitive robot control
Mengxi Li, Dylan P. Losey, Jeannette Bohg, Dorsa Sadigh IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Shared autonomy with learned latent actions
Hong Jun Jeon, Dylan P. Losey, Dorsa Sadigh Robotics: Science and Systems (RSS)
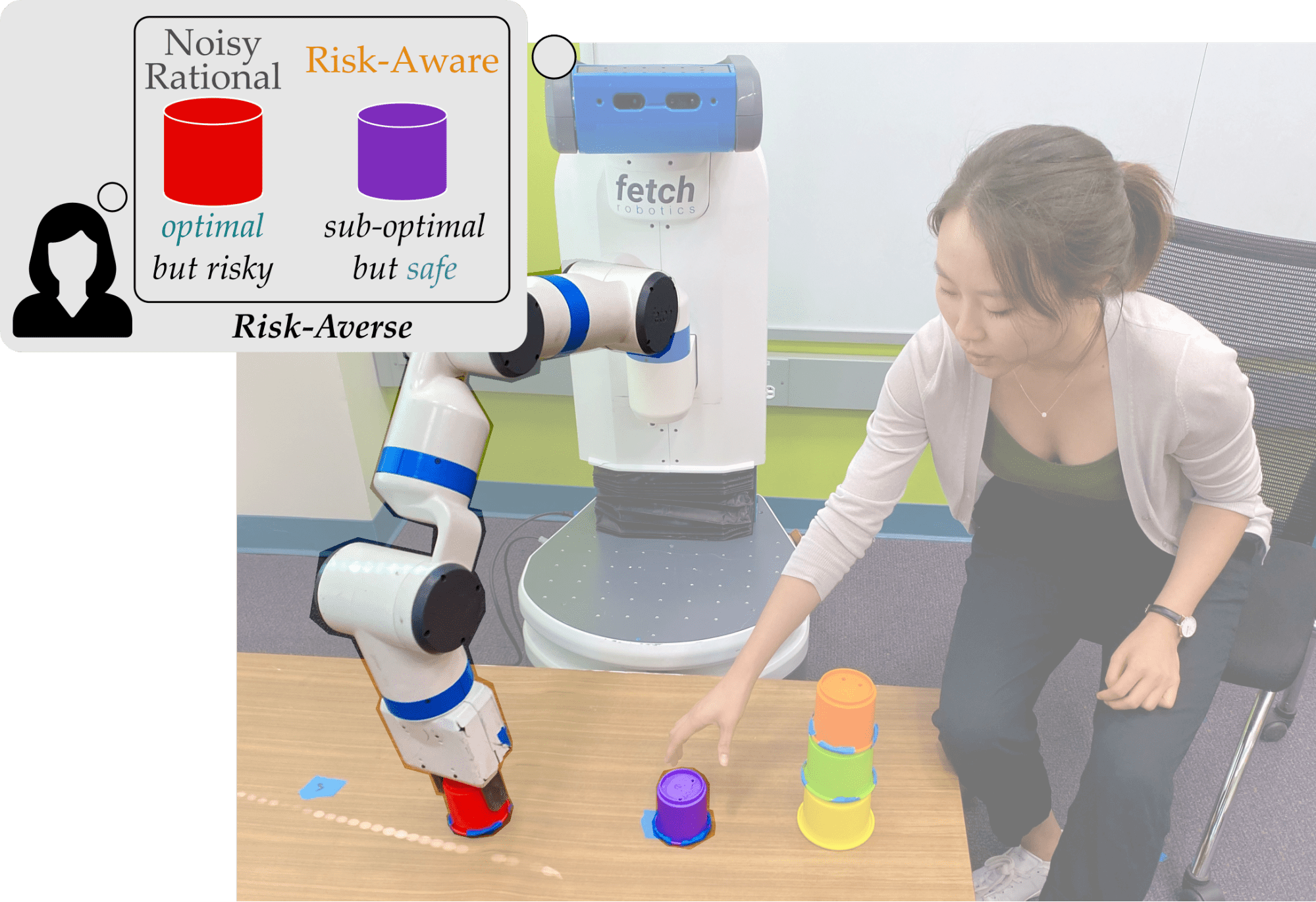
When humans aren’t optimal: Robots that collaborate with risk-aware humans
Minae Kwon, Erdem Biyik, Aditi Talati, Karan Bhasin, Dylan P. Losey, Dorsa Sadigh ACM/IEEE International Conference on Human-Robot Interaction (HRI)
Controlling assistive robots with learned latent actions
Dylan P. Losey, Krishnan Srinivasan, Ajay Mandlekar, Animesh Garg, Dorsa Sadigh IEEE International Conference on Robotics and Automation (ICRA)
2019
Learning the correct robot trajectory in real-time from physical human interactions
Dylan P. Losey, Marcia K. O'Malley ACM Transactions on Human-Robot Interaction
Learning from my partner’s actions: Roles in decentralized robot teams
Dylan P. Losey*, Mengxi Li*, Jeannette Bohg, Dorsa Sadigh Conference on Robot Learning (CoRL)
Asking easy questions: A user-friendly approach to active reward learning
Erdem Biyik, Malayandi Palan, Nicholas C. Landolfi, Dylan P. Losey, Dorsa Sadigh Conference on Robot Learning (CoRL)
Robots that take advantage of human trust
Dylan P. Losey, Dorsa Sadigh IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Improving short-term retention after robotic training by leveraging fixed-gain controllers
Dylan P. Losey, Laura Blumenschein, Janelle Clark, Marcia K. O'Malley Journal of Rehabilitation and Assistive Technologies Engineering
Enabling robots to infer how end-users teach and learn through human-robot interaction
Dylan P. Losey, Marcia K. O'Malley IEEE Robotics and Automation Letters
2018
Trajectory deformations from physical human-robot interaction
Dylan P. Losey, Marcia K. O'Malley IEEE Transactions on Robotics
A review of intent detection, arbitration, and communication aspects of shared control for physical human-robot interaction
Dylan P. Losey, Craig G. McDonald, Edoardo Battaglia, Marcia K. O’Malley Applied Mechanics Reviews
Including uncertainty when learning from human corrections
Dylan P. Losey, Marcia K. O'Malley Conference on Robot Learning (CoRL)
Learning from physical human corrections, one feature at a time
Andrea Bajcsy, Dylan P. Losey, Marcia K. O’Malley, Anca D. Dragan ACM/IEEE International Conference on Human-Robot Interaction (HRI)
2017
Learning robot objectives from physical human interaction
Andrea Bajcsy*, Dylan P. Losey*, Marcia K. O’Malley, Anca D. Dragan Conference on Robot Learning (CoRL)
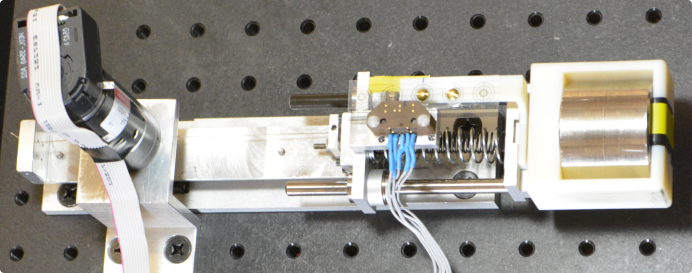
Effects of discretization on the K-width of series elastic actuators
Dylan P. Losey, Marcia K. O'Malley IEEE International Conference on Robotics and Automation (ICRA)
2016
A time domain approach to control of series elastic actuators: Adaptive torque and passivity-based impedance control
Dylan P. Losey, Andrew Erwin, Craig G. McDonald, Fabrizio Sergi, Marcia K. O’Malley IEEE/ASME Transactions on Mechatronics
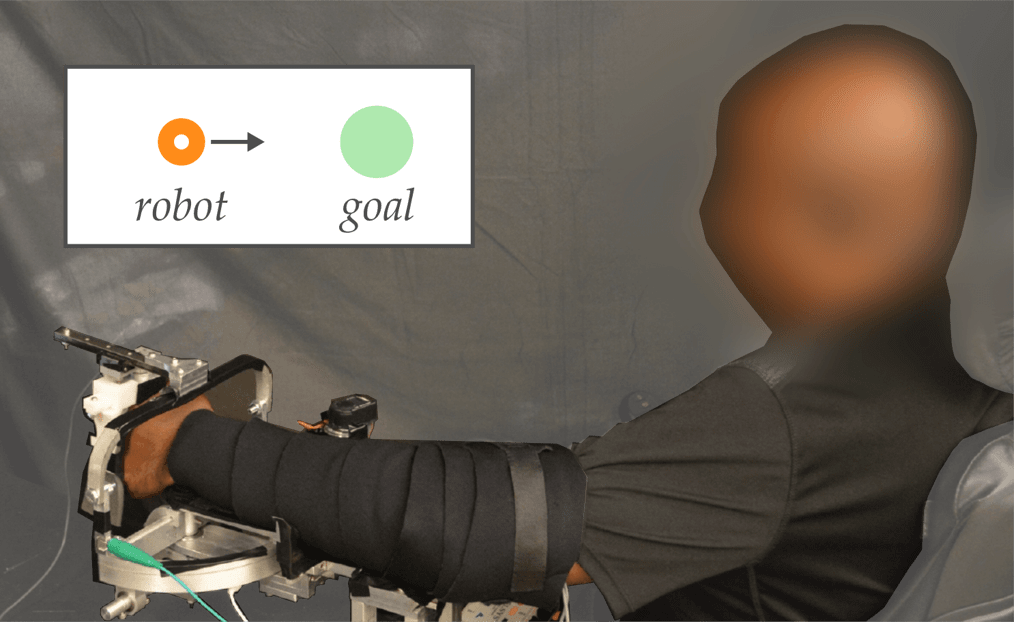
Minimal assist-as-needed controller for upper limb robotic rehabilitation
Ali Utku Pehlivan, Dylan P. Losey, Marcia K. O'Malley IEEE Transactions on Robotics